

Mesh Denoising
Brief Introduction
Mesh denoising has been widely used for geometry modeling and processing. Before raw noisy 3D models, obtained by various methods including scanners or vision-based 3D reconstruction, can be practically used for a variety of geometry processing, animation, and rendering applications, we need to produce their cleaned versions via mesh denoising. The main technical bottleneck of designing robust mesh denoising algorithms is to automatically identify various geometric features of interest (i.e., sharp and shallow features) on noisy models. Furthermore, this issue will become more challenging when heavy noise is present and/or input meshes are irregularly sampled.
Overview
The general process of a mesh denoising approach.
Results
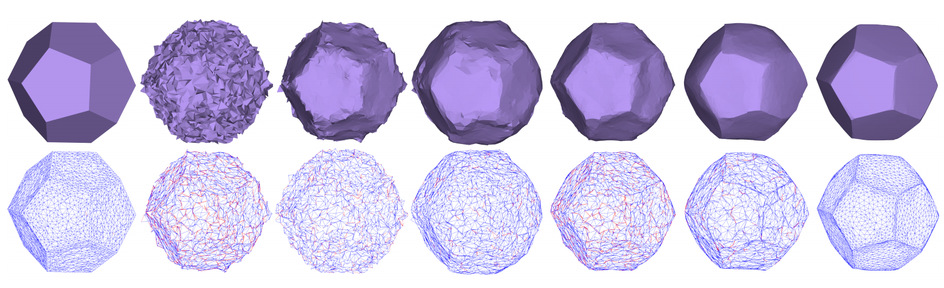
From left to right: initial surface, surface corrupted by Gaussian noise in random directions with standard deviation σ = 0.4le (le is the mean edge length), bilateral filtering [Fleishman et al. 2003], prescribed mean curvature flow [Hildebrandt and Polthier 2004], mean filtering [Yagou et al. 2002], bilateral normal filtering [Zheng et al. 2011], our method. The wireframe shows folded triangles as red edges. This figure is extracted from [He and Schafer 2013].
Members



Copyright Statement
This material is presented to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein are retained by authors or by other copyright holders. All persons copying this information are expected to adhere to the terms and constraints invoked by each author's copyright. In most cases, these works may not be reposted without the explicit permission of the copyright holder.