

车载碗形全景环视系统
车载碗形全景环视系统
背景介绍
汽车较多的刮擦和碰撞都发生在低速、复杂的路况场景下。由于驾驶员坐在车内,在车前、车两侧,车后均存在较多的盲区,再加上不同车型的长度、宽度差异较大,即便是有经验的驾驶员也不能保证能安全通过,更不用说一些新手和车感不太好的驾驶员。如果在盲区还有老人或者儿童,后果会更加严重。
现在主流的泊车辅助产品有全方位声呐雷达系统和单独的后视或侧视工具。但都存在很多局限。单独的后视和侧视产品只能看到汽车的一个方位的场景,无法消除盲区。而且给人的直观视觉感较差,容易造成方向误判。声呐雷达系统探测误差较大、角度有限。容易把垃圾、草木误判。
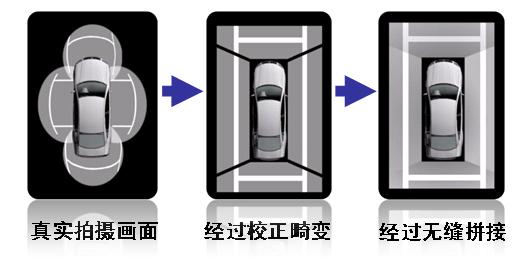
本文将设计车载碗形全景环视系统。在车的前后左右各安装一个鱼眼摄像头,通过采取4幅图片合成一个全景俯视图,并进行碗形变换。使用户可以获得一个从汽车顶上10m左右俯视视角的全景图片,并且清晰视野大,可达看清90平米区域。这不仅解决了视角盲区问题,还得到一个视野较大的清晰全景图片。可协助驾驶员安全通过以下场景:
汽车在低速的侧方位、后方位和前方位泊车。
窄道上与其它车辆回车。
通过崎岖、复杂的路况。
有障碍物的直角转弯。
可知道车身所处的周围环境关系。
工作流程概览
系统总体流程如下:

工作过程概要展示:
测试结果
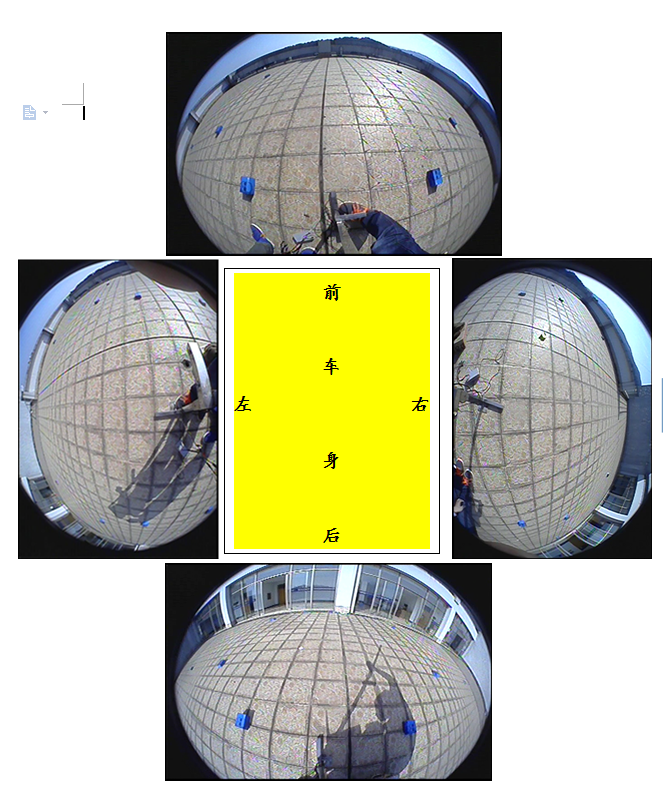
鱼眼摄像头拍摄的原始图片
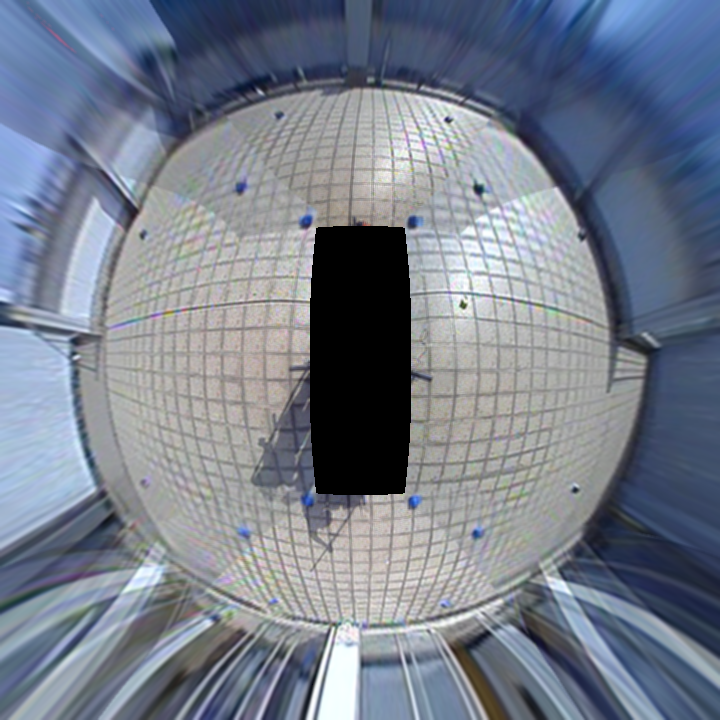
合成后的俯视全景图

鱼眼摄像头在车顶10米高处拍的俯视图
Members

Copyright Statement
This material is presented to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein are retained by authors or by other copyright holders. All persons copying this information are expected to adhere to the terms and constraints invoked by each author's copyright. In most cases, these works may not be reposted without the explicit permission of the copyright holder.